在上一节中,我教您如何实现最简单的MISC设备驱动程序。在本节中,我们将使用一个示例来驱动蜂鸣器。
为了方便起见,我将不编写用于测试的应用程序,而是直接在驱动程序中编写。调用打开功能。
该程序在Android系统中运行。稍后,我将教您如何在Android下编写应用程序测试程序。
我们参考以前编写的蜂鸣器驱动程序,将其移植到我们的程序中,并使其成为MISC设备。请参阅上一篇文章:http://blog.csdn.net/morixinguan/article/details/50628588接下来,看一下代码:#include& lt; linux / kernel.h& gt; #include& lt; linux / module.h& gt; #include& lt; linux / miscdevice.h& gt; #include& lt; linux / fs.h& gt; #include& lt; linux / types.h& gt; #include& lt; linux / moduleparam.h& gt; #include& lt; linux / slab.h& gt; #include& lt; linux / ioctl.h& gt; #include& lt; linux / cdev.h& gt; #include& lt; linux / delay.h& gt; #include& lt; asm / uaccess.h& gt; & nbsp; #include& lt; asm / irq。
h& gt; & nbsp; #include& lt; asm / io.h& gt; & nbsp;& nbsp; #include& lt; linux / gpio.h& gt; #include& lt; mach / gpio.h& gt; #include& lt; plat / gpio-cfg.h& gt; //定义配置蜂鸣器的IO地址#define GPD0CON& nbsp; 0x114000A0 volatile unsigned long * bell_config = NULL; & nbsp;& nbsp;易失的无符号长* bell_dat = NULL; & nbsp;& nbsp; //其他设备名称---& gt;它是字符设备#define DEVICE_NAME“ misc_dev”, //执行打开函数int tiny4412_misc_dev_open(struct inode * inode,struct file * filp){printk(“ tiny4412 bell dev open!
”); //将引脚配置为输出状态* bell_config& =〜(0xf); * bell_config | =(0x1); //打开蜂鸣器* bell_dat | = 0x1; return 0;} //执行关闭函数int tiny4412_misc_dev_close(struct inode * inode,结构文件* filp){printk(“ tiny4412 bell dev close!
”); //关闭蜂鸣器* bell_dat& =〜0x1; return 0;} //初始化文件操作结构struct file_operations tiny4412_file_ops = {.owner = THIS_MODULE,.open = tiny4412_misc_dev_open,.release = tiny4412_misc_dev_close,}; //初始化misc设备结构struct miscdevice tiny4412_misc_dev = {//次设备号由内核自动分配.minor = MISC_DYNAMIC_MINOR,//初始化设备名。名称= DEVICE_NAME,//初始化文件操作结构.fops = & amp; tiny4412_file_ops,};静态int __init tiny4412_misc_dev_init(void)  {int ret_error; // 1,映射IO //映射控制配置引脚IO bell_config =(volatile unsigned long *)ioremap(GPD0CON,16); & nbsp; & nbsp; & nbsp; //向GP0DAT添加4个字节的偏移量,并通过引脚状态控制IO映射物理地址。
& nbsp; bell_dat = bell_config + 1; // 2,注册其他设备int ret = misc_register(& tiny4412_misc_dev); if(ret!= 0){& nbsp; ret_error = ret; & nbsp; printk(“其他注册公平!
”); & nbsp; goto fair;} printk("杂项初始化成功!
”); //在此处直接调用open函数很方便,而不是直接编写应用程序以打开设备以访问tiny4412_misc_dev_open(NULL,NULL);返回ret公平:返回ret_error;}静态void __exit tiny4412_misc_dev_exit(void)  {/ /取消注册其他设备misc_deregister(& tiny4412_misc_dev); //取消映射& nbsp; & nbsp; iounmap(bell_config); & nbsp;} module_init(tiny4412_misc_dev_init); module_exit(tiny4412_misc_dev_exit); MODULE_AULICOR”; “ YYX添加其他驱动程序”);操作结果:在启动日志中,我们看到open函数被正确调用,并且蜂鸣器发出清晰的声音。至此,我们已经基于蜂鸣器完成了这个简单的杂项设备驱动程序,当然,如果您有兴趣,我们可以在Android上编写一个C应用程序,并在启动时将其作为服务加载。
加载后,在其中编写一个按键输入程序。当按下一个键时,将调用钟声打开功能,而在释放键时,将调用钟声关闭功能。
上述程序可以进一步优化并变得更好。
-
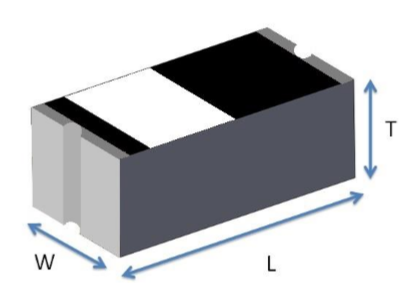
 WAN2614K245H04
WAN2614K245H04
-
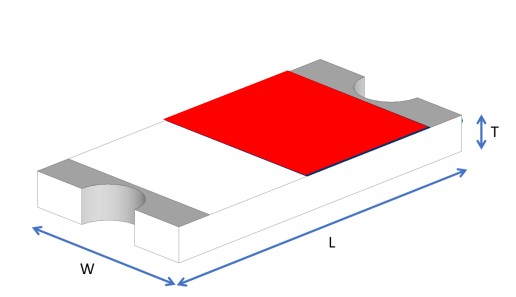
 WAN2012H245C04
WAN2012H245C04
-
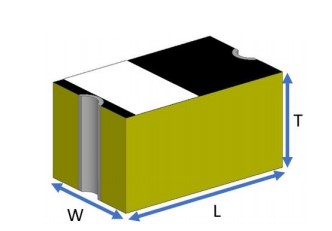
 SMFM2410
SMFM2410
-
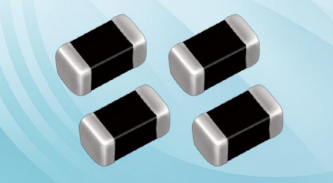
WAN2012F245C04
-
WAN2012F245H04
-
 SMFMH2410
SMFMH2410
-
 WAN2012K245H02
WAN2012K245H02
-
 SMFF2410
SMFF2410
-
 SMFF4012
SMFF4012
-
 WAN3216F245C04
WAN3216F245C04
-
 WAN2012F245M06
WAN2012F245M06
-
 SMFFH2410
SMFFH2410
-
 PLCC SMD-2.2X1.4mm LED灯珠
PLCC SMD-2.2X1.4mm LED灯珠
-
 WAN3216E245H02
WAN3216E245H02
-
 WAN2012K245HL5
WAN2012K245HL5
-
 PTTC聚鼎PMV0402-240E015
PTTC聚鼎PMV0402-240E015
-
WAN3216F245L18
-
 WAN3216F245M08
WAN3216F245M08
-
WAN2012F245L08
-
 WAN3216G245H01
WAN3216G245H01
-
 WAN3216F245H18
WAN3216F245H18
公司: 深圳市捷比信实业有限公司
电话: 0755-29796190
邮箱: ys@jepsun.com
产品经理: 李经理
QQ: 2057469664
地址: 深圳市宝安区翻身路富源大厦1栋7楼

更多资讯
获取最新公司新闻和行业资料。
- double sum = 0.0; for(int i = 0; i < n; i++) { if(resistors[i] > 0) { sum += 1.0 / resistors[i]; 在C语言中计算并联电阻的总电阻是一个常见的应用问题,它涉及到基本的物理知识与编程技巧的结合。并联电路中的总电阻可以通过所有并联电阻倒数的和的倒数来计算。首先,我们需要定义一个函数来处理这一计算过程。例如...
- 基于CY9BFx2xK/L/M MCU的I2C多任务器系统设计与优化策略 基于FM3 CY9BFx2xK/L/M MCU的I2C多任务器系统设计深度剖析随着物联网(IoT)设备复杂度提升,单片机系统面临越来越多的外设接入需求。采用I2C多任务器配合高性能MCU是当前主流解决方案之一。本文以富士通FM3系列中的CY9BFx2xK/L/M MCU为...
- 如何优化N沟道MOS管高边驱动中的驱动能力与稳定性 N沟道MOS管高边驱动的优化策略尽管N沟道MOS管在高边驱动中具有显著优势,但其驱动设计若不恰当,容易引发开关损耗增加、电磁干扰(EMI)上升等问题。因此,优化驱动能力与系统稳定性至关重要。1. 栅极驱动电压的精确控制建...
- 如何在8V~29V系统中正确设计P/N沟道MOS管驱动电路 引言:驱动电路的重要性在8V至29V的电力电子系统中,正确设计MOS管的栅极驱动电路是确保器件稳定、高效运行的关键环节。无论是P沟道还是N沟道器件,若驱动不当,可能导致导通不完全、开关速度慢甚至击穿损坏。核心设计原...
- 2.4G/WiFi/蓝牙双极天线与蓝牙5.2双模芯片:智能设备通信新引擎 引言:无线连接技术的演进随着物联网(IoT)和智能终端设备的普及,对高效、稳定、低功耗的无线通信方案需求日益增长。2.4G/WiFi/蓝牙双极天线配合蓝牙5.2与Wi-Fi双模芯片,正成为新一代智能设备的核心通信组件。一、双极天...
- I2C多任务器与FM3 CY9BFx2xK/L/M MCU协同应用解析 I2C多任务器与FM3 CY9BFx2xK/L/M MCU技术融合概述在现代嵌入式系统设计中,I2C总线作为低速、低成本的串行通信协议,被广泛应用于传感器、存储器、显示模块等外设连接。然而,当系统中需要连接多个I2C设备时,单一主控的资源限...
- S.J.X自动压力开关隔膜泵:高效稳定的流体传输解决方案 S.J.X自动压力开关隔膜泵是一种高效、耐用的流体传输设备,广泛应用于化工、制药、食品加工等行业。该泵采用先进的自动压力开关技术,能够根据系统的压力变化自动调节运行状态,有效防止过压或欠压情况的发生,从而保护...
- EUCHNER SN02R12-502-M 滚轮型行程开关:高性能与可靠性的结合 EUCHNER生产的滚轮型行程开关SN02R12-502-M是一款高品质、高可靠性的工业自动化控制部件。这款行程开关采用先进的设计理念和制造工艺,能够在各种恶劣的工业环境中稳定工作。其滚轮设计能够确保在移动部件到达预定位置时准确...
- N沟道MOS管工作原理与应用解析:从基础到实际电路设计 N沟道MOS管基本结构与工作原理N沟道MOS管(N-channel MOSFET)是金属-氧化物-半导体场效应晶体管的一种,其核心特点是在栅极施加正电压时,可在源极和漏极之间形成导电沟道,从而实现电流的控制。该器件由栅极(Gate)、源极(...
- 现货SMC压力开关ISE30A-01-N-L: 高性能与可靠性的结合 现货供应的SMC压力开关ISE30A-01-N-L是一种高性能的自动化控制元件,广泛应用于各种工业领域。这款压力开关具备精确的压力检测功能,能够在系统压力达到预设值时迅速做出反应,从而实现对机械设备的有效控制。ISE30A-01-N-L型号...
- 从零开始搭建特定应用时钟系统:实践指南与最佳实践 构建特定应用时钟系统的步骤构建一个高效的特定应用时钟系统需经过需求分析、设计、实现与测试四个阶段。以下为详细流程:1. 需求识别与分类首先明确哪些应用对时间敏感或有特殊时钟要求。例如:音频处理:要求极低抖...
- ME--M限位开关:自动化控制中的关键组件 ME--M限位开关是一种用于控制机械设备运动位置或行程的电子装置。这种开关通过检测机械部件的位置来实现自动化控制,广泛应用于各种工业设备和系统中。在实际应用中,ME--M限位开关能够帮助设备在达到预设位置时停止、改...
- 如何正确选型与应用2.1X0.6mm直角LED灯珠与2.0X1.2mm SMD LED灯珠? 精准选型指南:2.1X0.6mm与2.0X1.2mm LED灯珠深度解析在电子产品开发过程中,选择合适的LED灯珠是确保产品可靠性与用户体验的关键环节。本文结合实际工程案例,详细讲解两种常见微型LED灯珠——HELI2直角型2.1X0.6mm与标准SMD-2.0X1.2m...
- 爱克斯动力押扣开关APP01-210T/M:高性能与可靠性的结合 爱克斯动力的押扣开关APP01-210T/M是一款高性能、高可靠性的电气设备。这款产品设计紧凑,安装便捷,适用于多种工业环境。它主要应用于电力系统的控制和保护,例如在电机启动控制、电路保护等方面发挥着重要作用。APP01-210...
- BLDC马达驱动器设计要点与工程实践指南 BLDC马达驱动器设计的关键要素详解设计一款高性能的BLDC马达驱动器,需综合考虑电气性能、热管理、控制精度与成本控制等多个维度。以下为工程师在实际开发中必须关注的核心要点。1. 电子换向与位置反馈机制BLDC马达依赖精...
- 基于NPN晶体管的LED驱动方案在LNB系统中的实践应用 基于NPN晶体管的LED驱动在LNB系统中的创新应用随着卫星电视设备向小型化、智能化发展,LNB模块的电源管理与状态反馈功能日益重要。本文以实际工程案例为基础,分析如何利用简单而高效的NPN晶体管驱动电路实现对LED的精准控...
- MindSphere平台赋能:基于HiFlex与IntelliFET®的智能设备远程运维体系构建 MindSphere平台赋能:基于HiFlex与IntelliFET®的智能设备远程运维体系构建在数字化转型浪潮下,MindSphere作为西门子推出的开放式工业云平台,正推动传统设备向“可感知、可分析、可预测”的智能体演进。当HiFlex时钟产生器与Intelli...
- 聚鼎PH3-M瞬态抑制二极管插件TVS管:高效防护电子设备免受浪涌冲击 聚鼎PH3-M瞬态抑制二极管插件TVS管概述聚鼎PH3-M是一款高性能的瞬态抑制二极管(TVS),专为电路中快速瞬态电压抑制而设计。其采用插件式封装,适用于PCB板安装,具有响应速度快、钳位电压低、耐浪涌能力强等显著优势,广泛...
- 从硬件到云端:如何高效实现 ThunderBolt 切换器与 TIA Portal 及 MindSphere 的联动 从硬件到云端:如何高效实现 ThunderBolt 切换器与 TIA Portal 及 MindSphere 的联动随着工业4.0的深入发展,企业对“软硬一体”的集成化解决方案需求不断上升。要充分发挥 ThunderBolt 切换器在高速数据交换中的潜力,必须将其与西门子...
- 三端稳压器并联电容设计指南:从基础原理到工程实践 三端稳压器并联电容的设计原理与应用价值三端稳压器(如LM78xx系列)是传统电源管理中的经典器件,广泛应用于车载仪表、传感器供电、车载音频系统等场景。尽管其结构简单,但并联电容的合理配置对其性能表现起决定性作...